Method
1. Physics-Grounded Tactile Representation: Center-of-Pressure (CoP)
CoP consists of a single 3-dimensional force vector \({}^\mathcal{S}f_{\mathrm{cop}}\in\mathbb{R}^3\) representing the total force acting on the robot link by the object, and the 3-dimensional Cartesian coordinates of a single centroidal contact point \({}^\mathcal{S}p_{\mathrm{cop}}\in\mathbb{R}^3\), both expressed in the sensor frame \(\mathcal{S}\).
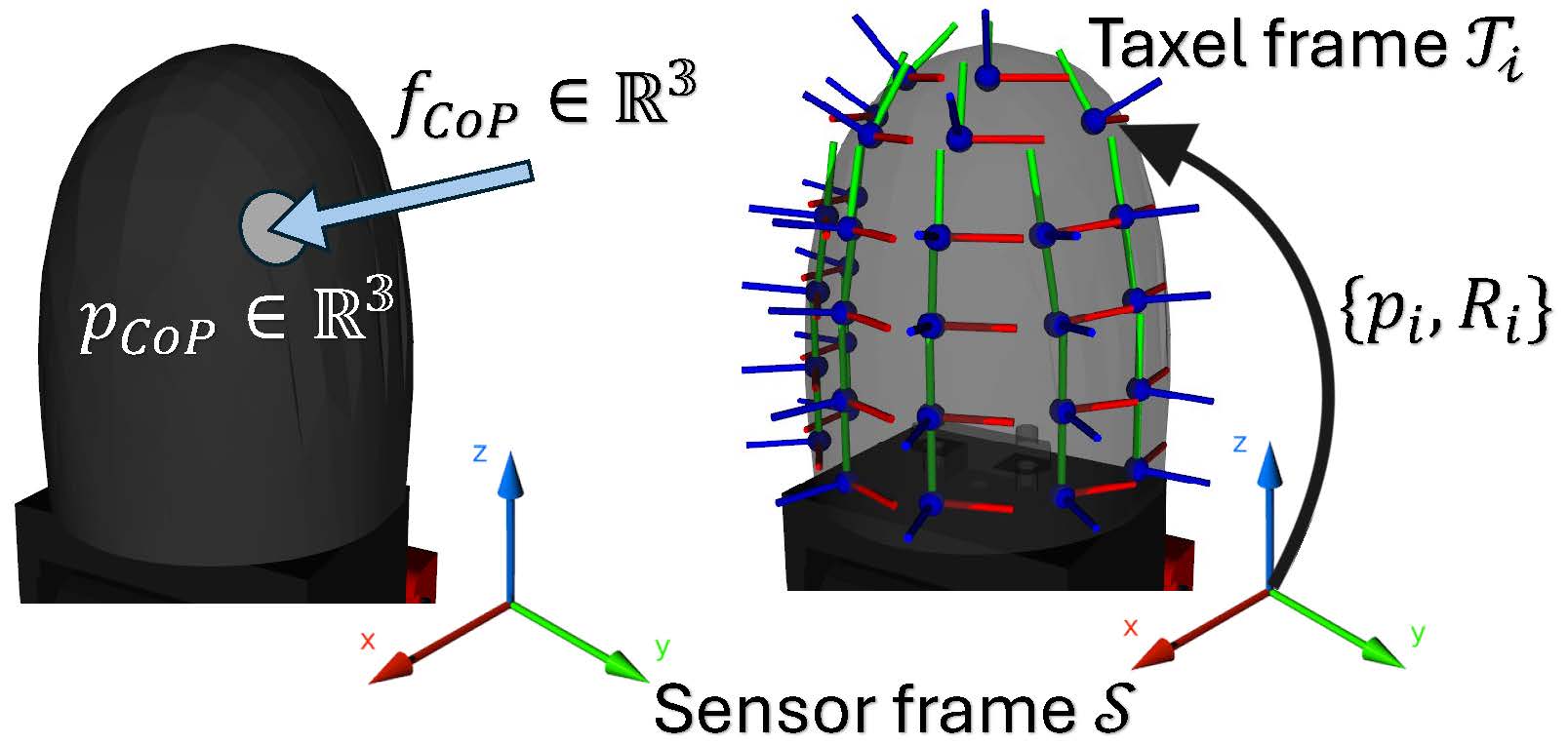
Left: CoP quantities expressed in sensor frame \(\mathcal{S}\). Right: Transformation between each taxel frame \(\mathcal{T}_i\) and sensor frame \(\mathcal{S}\) for the XELA uSkin sensor arrays used in this work.

The hardware used in this work is the Allegro hand (16 DOFs) equipped with XELA uSkin tactile sensors.
2. Differentiable, Bidirectional Tactile-CoP Mapping
Sensor surface deformation model: A contact force $f_{\rm{cop}}$ is decomposed into normal $f_n$ and shear $f_s$ components. We then model the normal $f_{i,n}$ and shear $f_{i,s}$ effective forces on each taxel $i$ under surface deformation, accounting for changed force direction and decayed magnitude due to internal force distribution. The effective normal and shear components are combined to obtain the resulting taxel force $f_i$.
Based on the deformation model, the raw taxel forces $f_i$ and the CoP force $f_{\rm_{cop}}$ can be related via a simple linear mapping, \(f_i = M_i f_{\rm{cop}}\) , where \(M_i \in\mathbb{R}^{3\times3}\) is the taxel-specific mapping matrix.
3. Sensor Calibration via Differentiable Dynamics
We present a novel method to learn the taxel orientations via differentiable dynamics, without requiring any ground-truth force measurements.
Slide to see intermediate stages of learning (from randomly initialized taxel rotations)